We are getting close to finishing the update to our wiring on our 1994
Catalina 320 Achernar. As the boat came, it had the original Raymarine
depth, wind, speed, and autopilot devices at the binnacle. It also came with
an approximately ten-year-old
AIS, antenna splitter, AM/FM radio, and chart plotter, as well as an ancient VHF
radio, and Garmin radar dome on the mast. The chart plotter supports NMEA
2000, but the AIS only supports NMEA 0183 (see the
other posts
we have done about these technologies). The NMEA 2000 network on the boat only
had three drops: 12V in, a Garmin 17X GPS antenna, and the Garmin 4212 chart
plotter. The chart plotter showed radar and GPS, but none of the info from the
devices at the binnacle, nor the AIS info. The AIS broadcasted the info about
the location of our boat, but didn't have any way to show the location of any
other boats.
Our goals:
-
A VHF radio that supports
DSC
- A VHF remote handset accessible from the cockpit
- A chart plotter showing depth, wind, speed, autopilot, and AIS info
-
Saillogger recording the info on our travels with a reliable Internet
connection
- Replace as few of the instruments and devices as possible
Eventually, we'd like to replace all the instruments and devices with
state-of-the-art equipment. But this will take a considerable amount of time
and we'd rather be out cruising.
Since the VHF radio didn't support DSC, that required a replacement. We
consider DSC to be a critical safety system on the boat as it provides a panic
button that alerts the Coast Guard to our exact location should we run into
problems. We replaced the VHF with a new Standard Horizon GX6000 (in
retrospect, we could have gone with a cheaper radio and still met our goals).
We also acquired the RAM4 wired remote microphone. We considered the wireless
remote microphone, but the reviews we read said that the wireless version was
unreliable. Unfortunately, the squelch on the radio failed shortly after we
installed it, causing the radio to blast static at full volume. We had to send
it in for warranty repair, which required almost six weeks to turn around,
plus the cost of shipping it to them.
We ran new wires between the "garage" (the large locker on the port side of
the Catalina 320) and the panel to the right of the chart table in the cabin.
The two wires we ran were a NMEA 2000 backbone cable and the cable to support
the RAM4 microphone. There is a channel for wires that runs across the top
behind the galley cabinets. We opened the panel on the right side of the top
right cabinet that allowed a fish tape to be extended from the electrical
panel, through the channel, to the garage. This made fishing the new cables
relatively easy. There is lots of room for cables in the channel.

|
|
Wires run under the pedestal in the aft cabin
|
In the garage, we added two blocks that provide the connection of the NMEA
2000 backbone to the devices at the binnacle. The ST60+ depth, ST 30 wind, ST
30 speed, and ST4000+ autopilot were all connected to each other with a
SeaTalk1 network. However, the network did not extend anywhere else. We ran a
new SeaTalk1 cable from the garage to the port aft lazarette, then under the
pedestal in the aft cabin and up the stanchion to the devices. This required
taking off the cover from under the pedestal in the aft cabin, which was held
in place with bunch of screws. We removed two cables that ran up to the
instrument panel: an obsolete and unused depth cable and a power cable. This
freed space inside the port-side stainless steel pedestal support stanchion.
We pulled the SeaTalk1 cable by taping it to one of the cables we were
removing. We had to cut the SeaTalk1 cable to pull it, then splice the cable
back together because the cable end was too large to fit down the stanchion.
Because the SeaTalk1 cable provides power, we no longer needed the separate
power cable and removed it.
The SeaTalk1 cable is attached to a small block that just allows another
SeaTalk1 cable to be plugged in. That then connects to the SeaTalk1 to SeaTalk
NG Converter. This block converts SeaTalk1 to SeaTalk NG (which is the same
protocol as NMEA 2000, but with proprietary connectors). This then has a cable
that has a SeaTalk NG connector on one end and NMEA 2000 connector on the
other. This connects to the NMEA 2000 backbone. As soon as this was connected,
the chart plotter started showing wind speed, wind direction, and depth. This
info was also passed to saillogger, so shows up on the monitor page.

|
Achernar Wiring Block Diagram
|
The other end of the NMEA 2000 backbone runs into the cabin. This is connected
to the Standard Horizon GX6000 VHF. Although the radio has an AIS receiver
(but not transmitter) built in, we are not using it, instead using the West
Marine AIS 1000 transceiver that came with the boat. (For the last five years
Standard Horizon has described a GX6500 model that has an AIS transceiver
built in, but the rumor is they have had trouble getting it certified by the
FCC.) While we could receive AIS on the GX6000 and transmit with the AIS 1000,
we run into a little problem with the antenna.
On a sloop sail boat, you only have one mast, but you need two antennas: one
for VHF transmissions and one for AIS transmissions. They need to be separated
by several feet. On a power boat, you can just fix two antennas to the top of
the cabin in different places. On a sail boat, the workaround is something
called an antenna splitter. You put up one antenna, but plug the VHF and the
AIS into the antenna splitter and connect that to the antenna. (It can also
handle AM/FM.) VHF is considered a safety system. If you push the DSC panic
button, you cannot have the AIS transmitting, so when the VHF is being used,
the splitter gives it priority. But if you have two AIS units, you will need
two splitters, which would theoretically work, but asking for trouble. (Why
the GX6000 doesn't have an antenna splitter built-in is a mystery.)
Instead, we just ignored the fact that the radio has an AIS receiver and used
the West Marine AIS 1000 transceiver that came with the boat. That came with
its own can of worms, the first of which was that we changed the MMSI
associated with the boat. The MMSI that came with the boat was likely issued
by BoatUS or the US Power Squadron. These free numbers only work in the United
States. We plan on going to Canada on our boat, so the MMSI needs to be issued
by the FCC. An FCC MMSI (which you can identify because it ends in zero) is
exchanged with other countries, including Canada. This allows you to push the
DSC panic button in Canadian waters and the Canadian Coast Guard will come
rescue you. We applied for and received our new MMSI.
However, the FCC does not let end users of electronic equipment arbitrarily
change the MMSI on equipment. Our new radio lets you put the number in once,
but you have to send it back to Standard Horizon to change it thereafter. Our
West Marine AIS already had a MMSI inputted, so it could not be changed. We
contacted West Marine, but of course they are not the manufacturer, no longer
sell it, and don’t really support it any more. West Marine emailed back some
minimally helpful information that eventually led to getting it changed.

|
|
The wiring in the garage. Not as beautiful as we would like, but better
than it was.
|
The next challenge was that for the chart plotter to get the AIS info. We
needed the AIS to be on the NMEA 2000 network. That is all well and good,
except the AIS 1000 only does NMEA 0183. We bought a Digital Yachts iKonvert
unit that converts 0183 to 2000. While relatively expensive, it still was much
cheaper than buying a new NMEA 2000 compatible AIS transceiver. The iKonvert
little box has a NMEA 0183 connector on one side and a NMEA 2000 connector on
the other. There are also DIP switches that control what messages should get
passed through and the speed of the connection, which we set to AIS and GPS
transmitting at 38400 baud. As soon as it was connected, the AIS info from
other boats started showing on the chart plotter. A friend confirmed that we
were transmitting our location, but that was always working.
But then a new problem started happening: The chart plotter was getting GPS
info unreliably. The AIS 1000 has its own GPS antenna, separate from the one
on NMEA 2000 network. The iKonvert was passing GPS info through from the AIS
1000 to the NMEA 2000 network, and the Garmin 4212 chart plotter was
prioritizing the AIS 1000 GPS info. For whatever reason, this info was coming
through intermittently and causing an error. We finally found the setting in
the chart plotter to prioritize the Garmin X17 GPS antenna, which solved the
problem.
We mounted the external connection for the RAM4 microphone on the port side,
just below the propane locker. The boat came with about an inch diameter of
broken fiberglass at exactly this spot which needed to be repaired, so
drilling it out solved two problems. The one drawback to this location is that
the aft locker door will run into the microphone if it is fully opened. So we
will be attaching a cable to limit the distance the door will open by a couple
of inches.
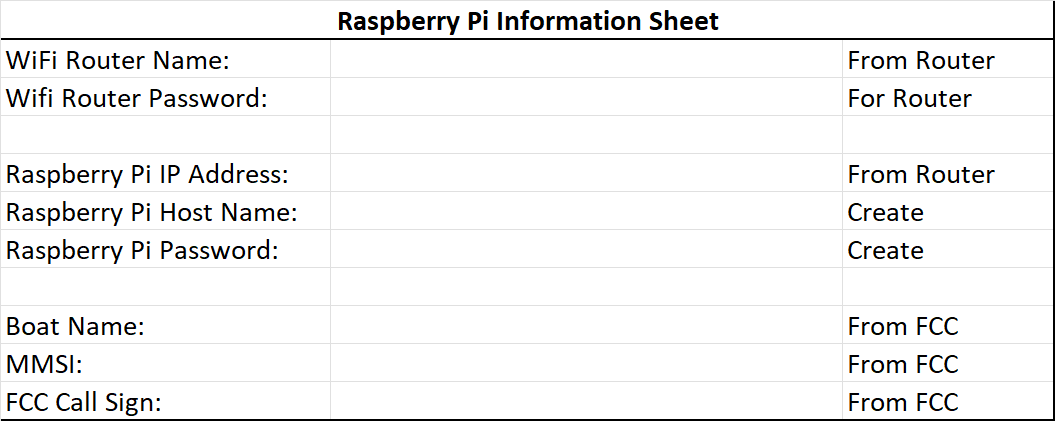
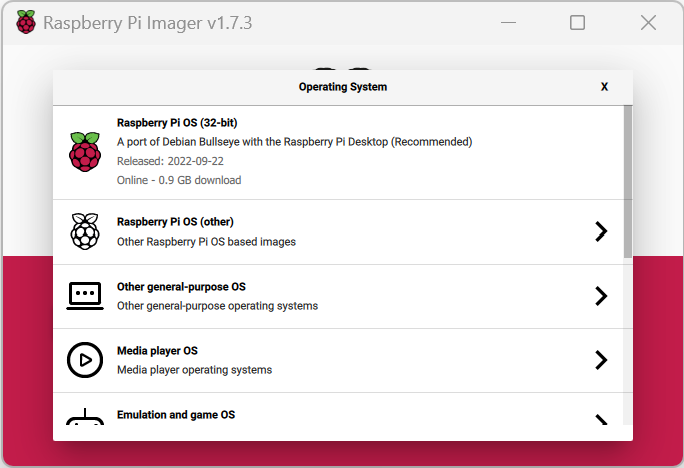
The last thing we needed was for the Raspberry Pi that saillogger runs on to
have a reliable Internet connection. For that we acquired a Galaxy pad A7 Lite
with a SIM card from T-Mobile. This runs a wi-fi hotspot that the Pi connects
to. The monthly cost is relatively cheap, and the device was free after paying
tax and a connection charge.
All of the equipment is now connected and working. Our next step is to make it
all pretty, but that’s a topic for another day.